
Mostrar el registro sencillo del ítem
A Roadmap to Robot Motion Planning Software Development
| dc.contributor.author | Pérez Ruiz, Alexander | |
| dc.contributor.author | Rosell, Jan | |
| dc.date.accessioned | 2023-05-16T17:19:28Z | |
| dc.date.available | 2023-05-16T17:19:28Z | |
| dc.date.issued | 2009 | |
| dc.identifier.issn | 1061-3773 | spa |
| dc.identifier.uri | https://repositorio.escuelaing.edu.co/handle/001/2336 | |
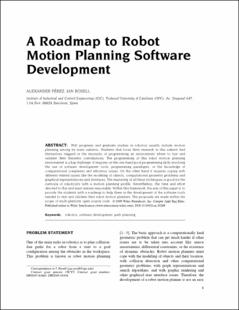
| dc.description.abstract | PhD programs and graduate studies in robotics usually include motion planning among its main subjects. Students that focus their research in this subject find themselves trapped in the necessity of programming an environment where to test and validate their theoretic contributions. The programming of this robot motion planning environment is a big challenge. It requires on the one hand good programming skills involving the use of software development tools, programming paradigms, or the knowledge of computational complexity and efficiency issues. On the other hand it requires coping with different related issues like the modeling of objects, computational geometry problems and graphical representations and interfaces. The mastering of all these techniques is good for the curricula of roboticists with a motion planning profile. Nevertheless, the time and effort devoted to this end must remain reasonable. Within this framework, the aim of this paper is to provide the students with a roadmap to help them in the development of the software tools needed to test and validate their robot motion planners. The proposals are made within the scope of multi-platform open source code. | eng |
| dc.description.abstract | Los programas de doctorado y los estudios de postgrado en robótica suelen incluir la planificación del movimiento entre sus temas principales. Los estudiantes que centran su investigación en este tema se ven atrapados en la necesidad de programar un entorno donde probar y validar sus aportaciones teóricas. La programación de este entorno de planificación del movimiento del robot es un gran reto. Requiere, por un lado, buenas habilidades de programación que impliquen el uso de herramientas de desarrollo de software, paradigmas de programación o el conocimiento de cuestiones de complejidad y eficiencia computacional. Por otro lado, requiere hacer frente a diferentes cuestiones relacionadas, como el modelado de objetos, los problemas de geometría computacional y las representaciones e interfaces gráficas. El dominio de todas estas técnicas es bueno para los currículos de los roboticistas con un perfil de planificación del movimiento. Sin embargo, el tiempo y el esfuerzo dedicados a este fin deben seguir siendo razonables. En este marco, el objetivo de este artículo es proporcionar a los estudiantes una hoja de ruta que les ayude en el desarrollo de las herramientas de software necesarias para probar y validar sus planificadores de movimiento robótico. Las propuestas se realizan en el ámbito del código fuente abierto multiplataforma. | spa |
| dc.format.extent | 12 páginas | spa |
| dc.format.mimetype | application/pdf | spa |
| dc.language.iso | eng | spa |
| dc.publisher | Universitat Politècnica de Catalunya | spa |
| dc.rights.uri | https://creativecommons.org/licenses/by-nc-nd/4.0/ | spa |
| dc.source | https://upcommons.upc.edu/handle/2117/115895 | spa |
| dc.title | A Roadmap to Robot Motion Planning Software Development | eng |
| dc.type | Artículo de revista | spa |
| dc.type.version | info:eu-repo/semantics/publishedVersion | spa |
| oaire.accessrights | http://purl.org/coar/access_right/c_abf2 | spa |
| oaire.version | http://purl.org/coar/version/c_970fb48d4fbd8a85 | spa |
| dc.contributor.researchgroup | Grupo de Investigación Ecitrónica | spa |
| dc.identifier.doi | http://dx.doi.org/10.1002/cae.20269 | |
| dc.identifier.handle | http://hdl.handle.net/2117/115895 | |
| dc.identifier.instname | Universitat Politècnica de Catalunya | spa |
| dc.identifier.reponame | UPCommons | spa |
| dc.identifier.repourl | http://hdl.handle.net/2117/115895 | spa |
| dc.identifier.url | https://upcommons.upc.edu/handle/2117/115895 | |
| dc.publisher.place | Barcelona - España | spa |
| dc.relation.citationendpage | 12 | spa |
| dc.relation.citationstartpage | 1 | spa |
| dc.relation.citationvolume | 18 | spa |
| dc.relation.indexed | N/A | spa |
| dc.relation.ispartofjournal | Computer Applications in Engineering Education | eng |
| dc.relation.references | J. C. Latombe, Robot motion planning, Kluwer Academic Publisher, New York, 1991. | spa |
| dc.relation.references | S. M. LaValle, Planning algorithms, Cambridge University Press, New York, 2006. | spa |
| dc.relation.references | L. E. Kavraki and S. M. LaValle, Handbook of robotics, Springer-Verlag, Berlin Heidelberg, 2008, pp 109-129. | spa |
| dc.relation.references | E. Plaku, K. E. Bekris, and L. E. Kavraki, OOPS for planning: An online open-source programming system, IEEE Int Conf Robotics Autom (2007), 3711-3716. | spa |
| dc.relation.references | L. Kavraki and J.-C. Latombe, Randomized preprocessing of configuration for fast path planning, IEEE Int Conf Robotics Autom (1994), 2138-2145. | spa |
| dc.relation.references | J. J. Kuffner Jr., and S. M. LaValle, RRT-Connect: An efficient approach to single-query path planning, IEEE Int Conf Robotics Autom (2000), 995-1001. | spa |
| dc.relation.references | G. Booch, Object-oriented analysis and design with applications, Addison Wesley Longman Publishing Co., Inc., Redwood City, CA, 2004. | spa |
| dc.relation.references | G. Booch, J. Rumbaugh, and I. Jacobson, The unified modeling language. Addison Wesley, Massachusetts, 1999. | spa |
| dc.relation.references | B. Collins-Sussman, B. Fitzpatrick, and M. Pilato, Version control with subversion. O’Reilly Media Inc., Sebastopol, CA, 2007. | spa |
| dc.relation.references | K. Martin and B. Hoffman, Mastering CMake: A cross-platform build system. Kitware Inc., New York, 2005. | spa |
| dc.relation.references | J. Blanchette and M. Summerfield, Cþþ GUI programming with Qt 4. Prentice Hall PTR, Upper Saddle River, NJ, 2006. | spa |
| dc.relation.references | S. Gottschalk, M. C. Lin and D. Manocha, OBBTree: A hierarchical structure for rapid interference detection, Computer Graphics 30 (1996), 171-180. | spa |
| dc.relation.references | G. van den Bergen, Efficient collision detection of complex deformable models using AABB trees, J Graph Tools 2 (1997), 1-13 | spa |
| dc.relation.references | E. Larsen, S. Gottschalk, M. C. Lin, and D. Manocha, Fast proximity queries with swept sphere volumes, Department of Computer Science, University of North Carolina, Chapel Hill, 1999. | spa |
| dc.relation.references | S. Rabin, AI game programmingn wisdom 2. Charles River Media Inc., Hingham, Massachusetts, 2003. | spa |
| dc.relation.references | J. H. Halton, On the efficiency of certain quasi-random sequences of points in evaluating multi-dimensional integrals, Numer Math 2 (1960), 84-90. | spa |
| dc.relation.references | J. Rosell, M. Roa, A. Pérez, and F. García, A general deterministic sequence for sampling d-dimensional configuration spaces, J Intell Robotic Syst 50 (2007), 361-373. | spa |
| dc.relation.references | S. Arya, D. M. Mount, N. S. Netanyahu, R. Silverman, and A. Y. Wu, An optimal algorithm for approximate nearest neighbor searching fixed dimensions, J ACM 45 (1998), 891-923. | spa |
| dc.relation.references | A. Yershova and S. LaValle, Improving motionplanning algorithms by efficient nearest-neighbor searching, IEEE Trans Robotics 23 (2007), 151 -157. | spa |
| dc.relation.references | L.-Q. Lee, J. G. Siek, and A. Lumsdaine, The generic graph component library, 14th ACM SIGPLAN conference on Object-oriented programming, systems, languages, and applications (1999), 399-414. | spa |
| dc.relation.references | J. Rosell, C. Vázquez, A. Pérez, and P. Iñiguez, Motion planning for haptic guidance, J Intell Robotic Syst 53 (2008), 223-245. | spa |
| dc.rights.accessrights | info:eu-repo/semantics/openAccess | spa |
| dc.rights.creativecommons | Atribución-NoComercial-SinDerivadas 4.0 Internacional (CC BY-NC-ND 4.0) | spa |
| dc.subject.armarc | Robots - Programación | spa |
| dc.subject.armarc | Robots - Programming | eng |
| dc.subject.armarc | Desarrollo de software | spa |
| dc.subject.armarc | Computer software - Development | eng |
| dc.subject.armarc | Robótica | spa |
| dc.subject.armarc | Robotics | eng |
| dc.subject.armarc | Educación - Enseñanza | spa |
| dc.subject.armarc | Education - Study and teaching | eng |
| dc.subject.proposal | Robotics | eng |
| dc.subject.proposal | Software development | eng |
| dc.subject.proposal | Path planning | eng |
| dc.type.coar | http://purl.org/coar/resource_type/c_2df8fbb1 | spa |
| dc.type.content | Text | spa |
| dc.type.driver | info:eu-repo/semantics/article | spa |
| dc.type.redcol | http://purl.org/redcol/resource_type/ART | spa |
Ficheros en el ítem
Este ítem aparece en la(s) siguiente(s) colección(ones)
-
AB - Ecitrónica [122]
Clasificación: A - Convocatoria 2018

Excepto si se señala otra cosa, la licencia del ítem se describe como https://creativecommons.org/licenses/by-nc-nd/4.0/








